
El H. Comité Organizador del Concurso Interuniversitario de Robótica invita a todos los interesados a participar en la categoría de “Carrera de Persecución” que se llevará a cabo dentro del marco de competencias del evento DÍA DE LA ROBÓTICA UPB 2016.
Reglamento Categoría Persecución Interuniversitario
A. COMPETENCIA:
1. El concurso de carrera de persecución de robots consistirá en lograr que dos participantes con sus respectivos robots sigan fielmente una línea negra de 1.5 cm de ancho, dibujada sobre un fondo de color blanco. La línea negra puede presentar discontinuidades en su trazo hasta por 5 mm.
Los robots partirán de diferentes lugares de la pista y el robot que logre alcanzar al otro ganara la contienda.
2. La salida iniciará en algún lugar de la línea que contenga una recta de al menos 100 mm.
3. El final de la prueba se considera cuando el robot dé alcance al robot contrincante, si la competencia es muy pareja y la distancia entre los dos robots sigue siendo notoria, se dejará a los dos robots terminar la persecución hasta que se terminen las baterías.
Si un robot en la persecución alcanza al otro, el dueño del robot deberá detenerlo.
B. CRITERIOS DE CALIFICACIÓN:
4. Los robots tendrán una oportunidad para realizar la persecución y será a muerte súbita.
5. Los robots siempre deberán seguir la línea, en caso de perderla, dispondrán de 5 segundos para retornar. Si pasado ese tiempo el robot no continúa la persecución en el tramo donde abandonó la línea, se dará por terminada la persecución y ganará el robot que quede en la trayectoria de la línea.
C. SOBRE LA EVALUACIÓN DE LA COMPETENCIA
6.Cada robot seguirá la trayectoria de la línea en forma autónoma y sólo se considerará al robot que alcance al robot rival.
a)Los dos robots se encontrarán en la posición de salida y el juez indicará cuando inicien la persecución. Esta competencia terminará hasta que se alcance al robot rival y si tardara mucho tiempo en hacerlo, se dejará que sigan funcionando hasta que se agoten sus baterías.
b)Si los dos robots se salieran de la línea en los primeros 5 s. de la persecución, se dará una nueva oportunidad de iniciar con la persecución (hasta dos veces).
c)Si se llegaran a agotar las baterías, ganará el robot que quede dentro de la pista y más cerca del robot rival.
D. REQUISITOS DE LOS PARTICIPANTES
7. Los puntos descritos a continuación son requisito para poder participar:
a)Descripción del robot. Cada equipo deberá entregar al jurado, al momento de su primera participación, un documento en Word o PDF, en electrónico donde se deberá describir al robot y su sistema de control. Indispensable para poder participar.
b)Carrocería. El robot puede o no contar con una carrocería que lo cubra, procurando siempre estar dentro de las dimensiones totales permitidas.
8.Pasará a la siguiente ronda el robot que logre vencer a su rival.
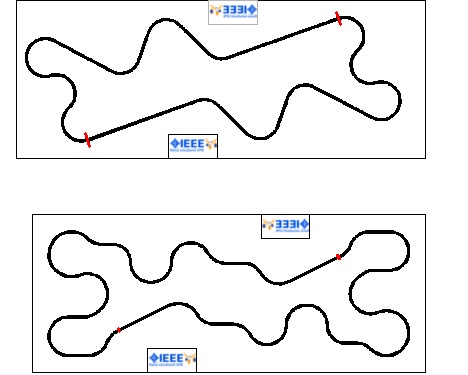
9.La pista que se utilizará en todas las rondas, será, sometiéndose a sorteo el uso entre las Pistas A y B disponibles
10.En la prueba final, los participantes contarán con un máximo de 15 minutos para efectuar algún ajuste en caso de requerirse. En caso de que se saliera de la línea uno de los dos robots en los primeros 5 segundos de iniciada la competencia, deberá de indicarlo al juez para que se le otorgue una oportunidad más y tendrá oportunidad de solicitarlo hasta en dos ocasiones (tiempo para poder ajustar su robot 30 segundos).
11.Los jueces para esta competencia serán designados por el comité organizador.
12. Los jueces serán los responsables de verificar las dimensiones de los robots de acuerdo a las especificaciones.
13.MÁXIMO 2 INTEGRANTES POR PROTOTIPO.
E. SOBRE LAS CARACTERÍSTICAS DE LOS ROBOTS DE CARRERAS
14. Diseñar y construir un robot móvil autónomo que sea capaz de seguir una trayectoria negra dibujada sobre fondo blanco y realizar una persecución a otro robot hasta darle alcance.
15. El robot deberá estar programado para arrancar 5 segundos después de haberse encendido.
16. El robot deberá ser controlado por cualquier microcontrolador..
17.El robot sólo podrá basarse en señales provenientes de sensores infrarrojos para detectar el color negro/blanco de la pista. No se permitirá ningún otro tipo de señales que permitan analizar el entorno (ultrasonido, cámaras, etc).
18.Las dimensiones máximas del robot serán de 20 cm. de largo, por 20 cm. de ancho, sin haber restricciones en cuanto a altura. Los diseños que no cumplan con estas especificaciones serán descalificados.
19.El equipo que no esté presente en su turno para realizar las pruebas del robot, pierde esa oportunidad.
20. Los puntos no previstos en la convocatoria se resolverán por el H. Comité Organizador.
F.SOBRE LAS CARACTERÍSTICAS DE LA PISTA
21. El ancho de la línea es de 1.5 cm.
22. Las curvas tendrán como mínimo 12 cm. de radio de curvatura, la trayectoria del robot será una curva suave.
23.La línea de la pista estará dibujada sobre una o varias superficies de color blanco.
24. El color de la línea de la pista es negro.
25.Una pista de pruebas, diferente a la pista del concurso, estará disponible.
26.Los concursantes o alguna otra persona se abstendrán de pisar, modificar o maltratar la pista, tanto de competencia como de pruebas.
LAS DOS PISTAS DISPONIBLES TENDRÁN LAS SIGUIENTES FORMAS, teniendo las dimensiones máximas de 2,5m * 1m:
G. TRANSITORIOS:
Todos aquellos sucesos que no se contemplen dentro del presente reglamento dentro y durante la competencia serán resueltos por el H. Comité Organizador sin derecho de apelación.
El H. Comité Organizador del DÍA DE LA ROBÓTICA UPB 2016, se reserva el derecho de generar y realizar modificaciones al presente reglamento sin previo aviso.